







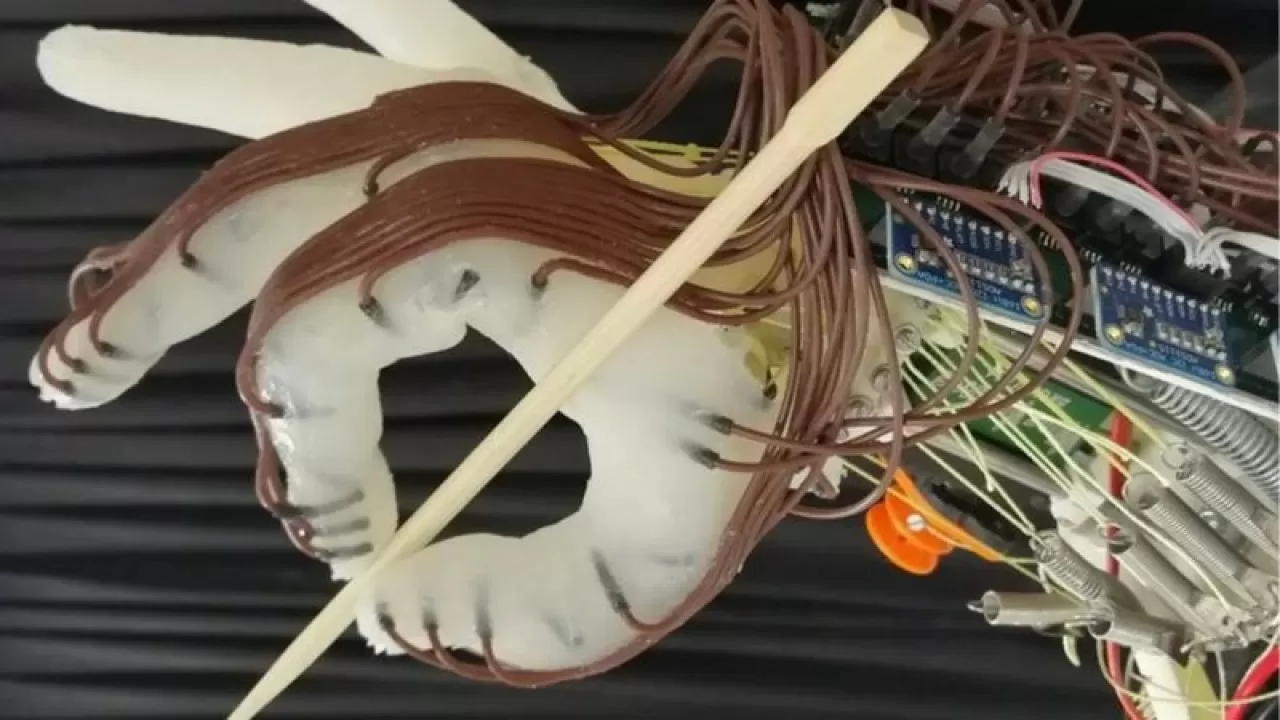
Стало известно, британские ученые разработали недорогую, энергоэффективную роботизированную руку. Она умеет захватывать различные предметы и не ронять их, используя только движение запястья и ощущения своей "кожи", передает inbusiness.kz со ссылкой на ВВС.
Исследователи из Кембриджского университета надеются, что эта технология в будущем может спасти жизни людей, ускорив клинические тесты и диагностику рака.
Рука оснащена датчиками, которые создатели сравнивают с кожей. Она способна определять, насколько сильное давление необходимо приложить для тех или иных действий, что позволяет устройству захватывать предметы, слишком хрупкие для обычных машин.
Исследователи из Кембриджского университета заявили, что эта механическая рука не требует самостоятельного движения пальцев и использует "пассивное" движение запястья, что делает их технологию недорогой и энергоэффективной.
Такой тип пассивного движения делает робота намного проще в управлении и намного более энергоэффективным, чем роботы с полностью моторизованными пальцами.
Роботизированная рука также может рассчитать, сумеет ли она удержать взятый предмет, с помощью установленных на ней датчиков.
По словам исследователей, их адаптируемая конструкция может быть использована при разработке недорогих роботов, способных двигаться более естественно и обучаться захвату широкого спектра объектов. О результатах исследования сообщается в журнале Advanced Intelligent Systems.
Ученые отметили, что человеческая рука очень сложна, поэтому воссоздание всех ее возможностей в роботе станет серьезной задачей.
В естественном мире движение происходит благодаря взаимодействию мозга и тела: это позволяет людям и животным двигаться сложными способами, не затрачивая лишней энергии. За последние несколько лет благодаря достижениям в области 3D-печати мягкие компоненты начали интегрировать в робототехнику, что позволило исследователям создавать простые, энергоэффективные системы, способные выполнять более сложные задачи.
Например, по словам экспертов, человек инстинктивно знает, какое усилие необходимо, чтобы взять и не раздавить, например яйцо, но для робота это непростая задача.
Ученые напечатали макет руки на 3D-принтере и оснастили ее датчиками, которые позволяют руке "чувствовать", к чему она прикасается.
Отдельные пальцы не были полностью моторизованы - рука способна воспроизводить только движения запястья.
Команда провела более 1200 тестов с роботизированной рукой, наблюдая за ее способностью захватывать небольшие предметы, не роняя их. Первоначально робот обучался на маленьких пластиковых шариках, напечатанных на 3D-принтере, и брал их, используя заранее заданные действия, смоделированные по образцу движения человеческой руки.
"Такая рука обладает некоторой пружинистостью: она может сама поднимать предметы без каких-либо действий пальцев, - говорит один из авторов исследования доктор Киран Гилдей. - Тактильные датчики дают роботу представление о том, насколько хорошо происходит захват, поэтому он знает, когда пальцы начинают соскальзывать. Это помогает ему предсказывать, когда произойдет сбой".
Методом проб и ошибок робот выяснил, какое усилие необходимо прилагать в том или ином случае. После завершения обучения руку заставили брать различные предметы, включая персик, компьютерную мышь и рулон пузырчатой пленки. В ходе этих испытаний рука смогла успешно захватить 11 из 14 предметов.
"Датчики - это что-то вроде кожи робота, они измеряют давление, оказываемое на объект, - объясняет доктор Томас Джордж-Турутел, преподаватель робототехники и искусственного интеллекта на факультете компьютерных наук Университетского колледжа Лондона. - Мы не можем точно сказать, какую информацию получает робот, но теоретически он может оценить, где был захвачен объект и с какой силой. Конструкция руки очень проста, но она может поднимать множество предметов с помощью одной и той же стратегии".
"Большим преимуществом этой конструкции является диапазон движения, который мы можем получить без использования каких-либо приводов. Мы хотим максимально упростить руку, - говорит Фумия Иида, профессор робототехники инженерного факультета Кембриджского университета. - Мы можем получить высокую степень контроля без каких-либо приводов, так что, когда мы их добавим, мы получим более сложное поведение в более эффективном корпусе".
Полностью управляемая роботизированная рука, помимо большого количества энергии, также требует сложной системы управления. Пассивная конструкция руки, разработанная в Кембридже, с использованием небольшого количества датчиков, проще в управлении, обеспечивает широкий диапазон движений и упрощает процесс обучения.
В будущем систему можно расширить несколькими способами, например, добавить возможности компьютерного зрения или научить робота использовать окружающую среду, что позволит ему захватывать более широкий спектр объектов.
Читайте по теме:
"Нюхающего" робота создали в Израиле




